pygame网络游戏_4_3:人物行走_自动寻路
1.本章效果
在讲代码之前,先看看本章实现的效果吧~
看完效果是不是迫不及待的想学习了?开搞开搞!
2.计算鼠标点中了地图的哪个格子
寻路之前,我们肯定得知道角色要去的终点坐标吧。
那么先看看我们已知什么:
1.鼠标点击窗口的坐标,用pygame.mouse.get_pos()就可以获取
2.地图的绘图坐标x,y
我们要求的是:
鼠标点中地图格子的坐标(列和行)mx,my
我们来看一张图,帮助我们理解:
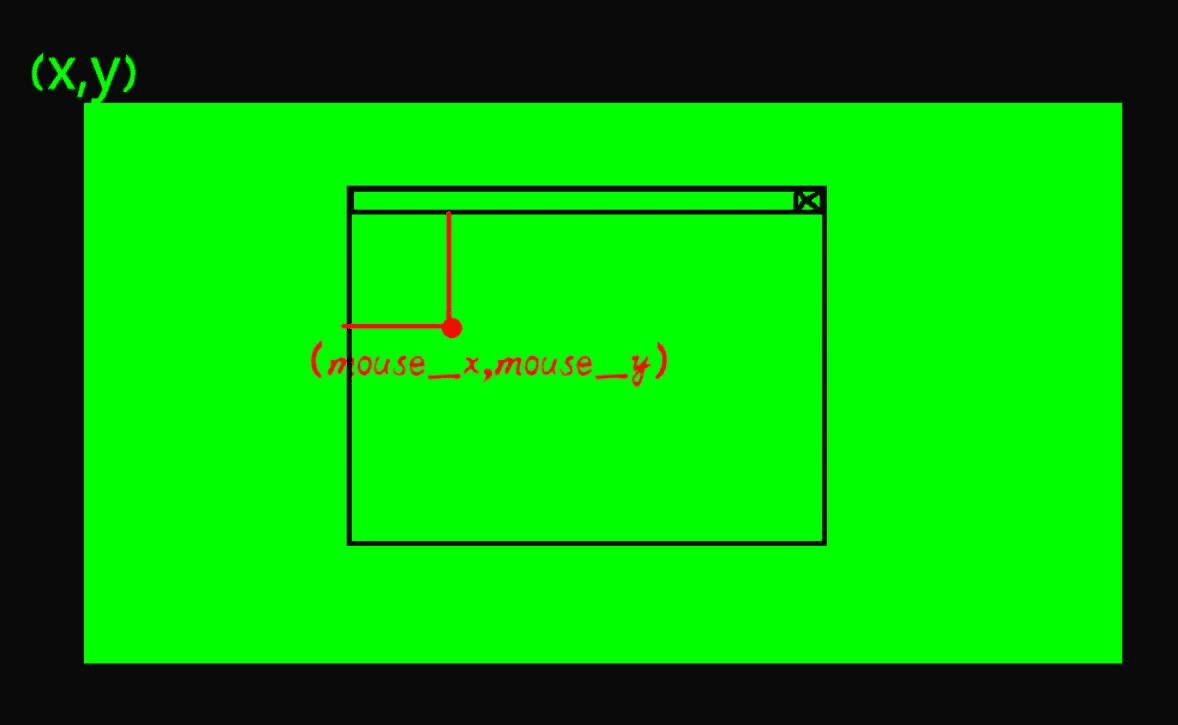
我们的窗口是装不下地图的,当角色移动的时候,地图会随着角色滚动(下一章将实现这个功能)。
根据这张图,很好得出鼠标在地图上的像素坐标是mouse_x-x,mouse_y-y,因为x,y是负数,所以相减就是加。
那么我们要求的mx,my就等于:
mx=(mouse_x-x)//32
my=(mouse_y-y)//32
因为每个格子占32像素,所以要除以32。
3.引入A星算法
关于A星算法是什么,小伙伴们可以自行百度,我这里就不再多做解释了。
a星算法我很早以前就用python实现了:python实现的A星算法
现在拿来用就完事啦~
新建astar.py(先别看里面的代码,目前会用就行):
class Point:
"""
表示一个点
"""
def __init__(self, x, y):
self.x = x
self.y = y
def __eq__(self, other):
if self.x == other.x and self.y == other.y:
return True
return False
def __str__(self):
return "x:" + str(self.x) + ",y:" + str(self.y)
class AStar:
"""
AStar算法的Python3.x实现
"""
class Node: # 描述AStar算法中的节点数据
def __init__(self, point, endPoint, g=0):
self.point = point # 自己的坐标
self.father = None # 父节点
self.g = g # g值,g值在用到的时候会重新算
self.h = (abs(endPoint.x - point.x) + abs(endPoint.y - point.y)) * 10 # 计算h值
def __init__(self, map2d, startPoint, endPoint, passTag=0):
"""
构造AStar算法的启动条件
:param map2d: Array2D类型的寻路数组
:param startPoint: Point或二元组类型的寻路起点
:param endPoint: Point或二元组类型的寻路终点
:param passTag: int类型的可行走标记(若地图数据!=passTag即为障碍)
"""
# 开启表
self.openList = []
# 关闭表
self.closeList = []
# 寻路地图
self.map2d = map2d
# 起点终点
if isinstance(startPoint, Point) and isinstance(endPoint, Point):
self.startPoint = startPoint
self.endPoint = endPoint
else:
self.startPoint = Point(*startPoint)
self.endPoint = Point(*endPoint)
# 可行走标记
self.passTag = passTag
def getMinNode(self):
"""
获得openlist中F值最小的节点
:return: Node
"""
currentNode = self.openList[0]
for node in self.openList:
if node.g + node.h < currentNode.g + currentNode.h:
currentNode = node
return currentNode
def pointInCloseList(self, point):
for node in self.closeList:
if node.point == point:
return True
return False
def pointInOpenList(self, point):
for node in self.openList:
if node.point == point:
return node
return None
def endPointInCloseList(self):
for node in self.openList:
if node.point == self.endPoint:
return node
return None
def searchNear(self, minF, offsetX, offsetY):
"""
搜索节点周围的点
:param minF:F值最小的节点
:param offsetX:坐标偏移量
:param offsetY:
:return:
"""
# 越界检测
if minF.point.x + offsetX < 0 or minF.point.x + offsetX > self.map2d.w - 1 or minF.point.y + offsetY < 0 or minF.point.y + offsetY > self.map2d.h - 1:
return
# 如果是障碍,就忽略
if self.map2d[minF.point.x + offsetX][minF.point.y + offsetY] != self.passTag:
return
# 如果在关闭表中,就忽略
currentPoint = Point(minF.point.x + offsetX, minF.point.y + offsetY)
if self.pointInCloseList(currentPoint):
return
# 设置单位花费
if offsetX == 0 or offsetY == 0:
step = 10
else:
step = 14
# 如果不再openList中,就把它加入openlist
currentNode = self.pointInOpenList(currentPoint)
if not currentNode:
currentNode = AStar.Node(currentPoint, self.endPoint, g=minF.g + step)
currentNode.father = minF
self.openList.append(currentNode)
return
# 如果在openList中,判断minF到当前点的G是否更小
if minF.g + step < currentNode.g: # 如果更小,就重新计算g值,并且改变father
currentNode.g = minF.g + step
currentNode.father = minF
def start(self):
"""
开始寻路
:return: None或Point列表(路径)
"""
# 判断寻路终点是否是障碍
if self.map2d[self.endPoint.x][self.endPoint.y] != self.passTag:
return None
# 1.将起点放入开启列表
startNode = AStar.Node(self.startPoint, self.endPoint)
self.openList.append(startNode)
# 2.主循环逻辑
while True:
# 找到F值最小的点
minF = self.getMinNode()
# 把这个点加入closeList中,并且在openList中删除它
self.closeList.append(minF)
self.openList.remove(minF)
# 判断这个节点的上下左右节点
self.searchNear(minF, 0, -1)
self.searchNear(minF, 0, 1)
self.searchNear(minF, -1, 0)
self.searchNear(minF, 1, 0)
# 判断是否终止
point = self.endPointInCloseList()
if point: # 如果终点在关闭表中,就返回结果
# print("关闭表中")
cPoint = point
pathList = []
while True:
if cPoint.father:
pathList.append(cPoint.point)
cPoint = cPoint.father
else:
# print(pathList)
# print(list(reversed(pathList)))
# print(pathList.reverse())
return list(reversed(pathList))
if len(self.openList) == 0:
return None
咋用呢?很简单:
path = AStar(map2d, start_point, end_point).start()
如果path为None,那么就是没有找到路径,否则path就是一个存了Point对象的列表。
Point对象有两个属性:x,y
4.改造CharWalk类
在__init__方法最后加上:
# 寻路路径
self.path = []
# 当前路径下标
self.path_index = 0
self.path用于存放寻路路径
self.path_index是角色当前在self.path中的下标
然后再给CharWalk类加上find_path方法:
def find_path(self, map2d, end_point):
"""
:param map2d: 地图
:param end_point: 寻路终点
"""
start_point = (self.mx, self.my)
path = AStar(map2d, start_point, end_point).start()
if path is None:
return
self.path = path
self.path_index = 0
这个方法就是用于寻路的,end_point是寻路终点,角色当前位置是寻路起点。
再给CharWalk类添加logic方法:
def logic(self):
self.move()
# 如果角色正在移动,就不管它了
if self.is_walking:
return
# 如果寻路走到终点了
if self.path_index == len(self.path):
self.path = []
self.path_index = 0
else: # 如果没走到终点,就往下一个格子走
self.goto(self.path[self.path_index].x, self.path[self.path_index].y)
self.path_index += 1
这个逻辑注释已经讲得很清楚了,我们在主循环中调用logic就行了。
Game类中的修改:
def __init_game(self):
"""
我们游戏的一些初始化操作
"""
self.hero = pygame.image.load('./img/character/hero.png').convert_alpha()
self.map_bottom = pygame.image.load('./img/map/0.png').convert_alpha()
self.map_top = pygame.image.load('./img/map/0_top.png').convert_alpha()
self.game_map = GameMap(self.map_bottom, self.map_top, 0, 0)
self.game_map.load_walk_file('./img/map/0.map')
self.role = CharWalk(self.hero, 48, CharWalk.DIR_DOWN, 5, 10)
def update(self):
while True:
self.clock.tick(self.fps)
# 逻辑更新
self.role.logic()
self.event_handler()
# 画面更新
self.game_map.draw_bottom(self.screen_surf)
self.role.draw(self.screen_surf, self.game_map.x, self.game_map.y)
self.game_map.draw_top(self.screen_surf)
# self.game_map.draw_grid(self.screen_surf)
pygame.display.update()
最后我们还得接收鼠标事件:
def event_handler(self):
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit()
elif event.type == pygame.MOUSEBUTTONDOWN:
mouse_x, mouse_y = pygame.mouse.get_pos()
mx = (mouse_x - self.game_map.x) // 32
my = (mouse_y - self.game_map.y) // 32
self.role.find_path(self.game_map, (mx, my))
大功告成,运行看看效果吧:
本章完